PWM制御 参考リンク[http://homepage1.nifty.com/rikiya/software/106pwm1.htm]
PWM制御とは、モータの電源を高速でon、off することでモータを制御する方法である。
高速でon、 offする比率のことをデューティー比と呼び、
デューティー比が高いほどモータが on になっている時間がながく、デューティー比が低いほど、off の時間がながくなります。
このように、電源を必要な時間だけon にするため、電源を消費しなくてすみます。
ただし、モータには固有の慣性力があり、それにあったパルスを送ってやらなくては、期待どうりにモータを制御できません。
mega8でのPWM制御
mega8ではタイマカウンタを用いてPWMの波形を生成します。
高速PWM制御、位相基準PWM制御、位相/周波数基準PWM制御の三つである。
高速PWM制御とは、単傾斜の波形であり、ほかの二つよりも、周波数を2倍高くできます。
しかし、モータの制御としては他の二つより向いていません。
位相基準PWM制御、位相基準/周波数PWM制御
位相基準PWM制御、は、両傾斜なのでモータ制御に好まれます。
その理由はdutyが両傾斜だと、求めやすいからです。
二つの違いは、位相基準PWM制御だと、カウンタ値が固定値(0x00FF,0x01FF,0x03FF)で、
OCRnxがTOPで更新となっており、出力の周期が非対称になる場合があります。
一方、位相基準/周波数PWM制御だと
カウンタ値はICR1値、OCR1A地で、OCRnxがBOTOM値で更新となっており、
出力の周期が全て対称となります。
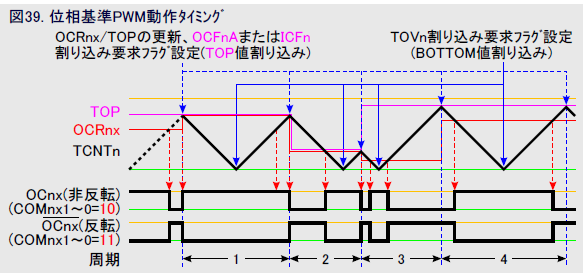
↑の図のように、位相基準PWM動作だと、TOPの値がカウント中に変更される場合
周期が図のようになり、出力波形が対称にはなりません。
(周期2-3の波形に注目)
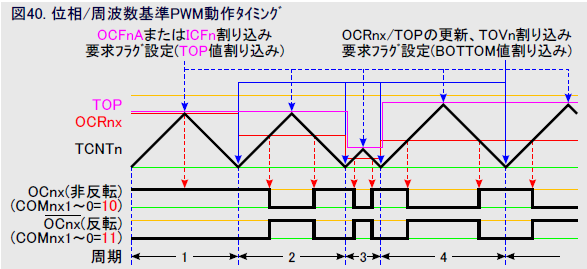
一方位相/周波数基準PWM動作では、TOPの値がカウント中に変更される場合でも、
出力波形が全て対称になります。(ただし、TOPの値をOCR1Aでとる必要がある。)
つまり、カウンタを使用中にTOP値を変える場合は、位相/周波数基準PWM動作
が推奨され、TOP値が変わらない場合は、どちらでも変わりません。
まぁ、TOPが変わるのかわかんないけど、全て対称の波形がでるなら
位相/周波数基準PWMを使ったほうがいいわな。
てな理由で位相/周波数基準PWMを使うといいんじゃね?